
Motores eléctricos
Indice:
Limitacion de la corriente

El motor de inducción es el más usado de todos los tipos de motores, ya que combina las ventajas de la utilización de energía eléctrica - bajo costo, facilidad de transporte, limpieza, simplicidad de comando - con su construcción simple y su gran versatilidad de adaptación a las cargas de los más diversos tipos y mejores rendimientos. Los tipos más comunes de motores eléctricos son:
a ) Motores de corriente continua.
Son motores de costo más elevado y, además de eso, precisan una fuente de corriente continua, o un dispositivo que convierta la corriente alterna común en continua. Pueden funcionar con velocidad ajustable, entre amplios límites y se prestan a controles de gran flexibilidad y precisión. Por eso, su uso es restricto a casos especiales en que estas exigencias compensan el costo mucho más alto de la instalación y del mantenimiento.
b ) Motores de corriente alterna.
Son los más utilizados, porque la distribución de energía eléctrica es hecha normalmente en corriente alterna. Los principales tipos son:
Motor síncrono: Funciona con velocidad fija, o sea, sin interferencia del deslizamiento; utilizado normalmente para grandes potencias (debido a su alto costo en tamaños menores).
Motor de inducción: Funciona normalmente con una velocidad constante, que varía ligeramente con la carga mecánica aplicada al eje. Debido a su gran simplicidad, robustez y bajo costo, es el motor más utilizado de todos, siendo adecuado para casi todos los tipos de máquinas accionadas, encontradas en la práctica. Actualmente es posible el control de la velocidad de los motores de inducción con el auxilio de convertidores de frecuencia.
Conceptos Básicos:
Conjugado.
El conjugado ( también llamado par o momento ) es la medida del esfuerzo necesario para girar un eje. Por la experiencia práctica se observa que para levantar un peso por un proceso semejante al usado en pozos ( figura 1.1 ) la fuerza F que es precisa aplicar a la manivela, depende de la longitud E de la misma. Cuanto mayor sea la manivela, menor será la fuerza necesaria. Si doblamos el tamaño E de la manivela, la fuerza F necesaria será disminuida a la mitad. En el ejemplo de la figura 1.1, si el balde pesa 20 N y el diámetro del tambor es de 0,20 m, la cuerda transmitirá una fuerza de 20 N en la superficie del tambor, es decir, a 0,10 m del centro del eje. Para contrabalancear esta fuerza, se precisa de 10 N en la manivela, si la longitud E es de 0,20 m. Si E es el doble, es decir, 0,40 m, la fuerza F será la mitad, o sea 5 N. Como vemos, para medir el “esfuerzo” necesario para girar el eje, no basta definir la fuerza empleada: es preciso también decir a qué distancia del centro eje la fuerza es aplicada. El “esfuerzo” es medido por el conjugado, que es el producto de la fuerza por la distancia, F x E. En el ejemplo citado, el conjugado vale:
C = 20 N x 0,10 m = 10 N x 0,20 m = 5 N x 0,40 m = 2,0 Nm
C = F . E ( N . m )

Energía
y Potencia Mecánica La potencia mide la “velocidad” con que la energía es aplicada
o consumida. En el ejemplo anterior, si el pozo tiene 24,5 metros de
profundidad, la energía gastada, o trabajo
20 N x
24,5 m = 490 Nm
Nota: la unidad de medida de energía mecánica, Nm, es la misma que
usamos para el conjugado - se trata, no obstante, de grandezas de
naturalezas diferentes, que no deben ser confundidas.
W = F .
d ( N . m )
La
potencia exprime la rapidez con que esta energía es aplicada y se calcula
dividiendo la energía o trabajo total por el tiempo gastado en realizarlo.
Entonces, si usamos un motor eléctrico capaz de levantar el
balde de agua en 2,0 segundos, la potencia necesaria sera:
Pmec = (F . d .W )/t
Si usamos un motor mas potente, con capacidad de realizar
el trabajo en 1,3 segundos, la potencia necesaria sera:
P2 = 490/1,3= 377 W
La unidad usada en Brasil para medida de potencia mecanica
y el cv ( caballo-vapor ), equivalente a 0,736 kW ( unidad de medida utilizada
internacionalmente para el mismo fin ).
Relacion entre unidades de potencia:
P ( kW ) = 0,736 . P ( cv )
P1 =245/ 736 =1/3 cv
Para movimientos circulares:
C = F . r ( N.m )
Donde: C = conjugado en Nm
Energia y Potencia Electrica.
Aunque la energia sea una sola cosa, la misma puede presentarse
de formas diferentes. Se conectamos una resistencia a una red electrica con
tension, pasara una corriente electrica que calentara la resistencia. La
resistencia absorbe energia electrica y la transforma en calor, que tambien es
una forma de energia. Un motor eléctrico absorbe energia electrica de la red y
la transforma en energía mecánica disponible en la punta del eje.
Circuitos de corriente continua.
La “potencia electrica”, en circuitos de
corriente continua, puede ser obtenida a traves de la relacion de la tension (
U ), corriente ( I ) y resistencia ( R ) implicadas en el circuito, o sea:
P = U .
I ( W )
Donde: U = tension
en Volt
Circuitos de corriente alterna.
a ) Resistencia.
En el caso de las “resistencias”, cuanto mayor sea la tensión de la red, mayor será la corriente y más deprisa la resistencia se calentará. Esto quiere decir que la potencia eléctrica será mayor. La potencia eléctrica absorbida de la red, en el caso de la resistencia, es calculada multiplicándose la tensión de la red por la corriente, si la resistencia ( carga ), es monofásica.
P = Uf . If ( W )
En el sistema trifásico, la potencia en cada fase de la carga será Pf = Uf x If, como si fuese un sistema monofásico independiente. La potencia total será la suma de las potencias de las tres fases, o sea:
P = 3Pf = 3 . Uf . If
Recordando que el sistema trifásico está conectado en estrella o triángulo, tenemos las siguientes relaciones:
Conexión estrella: U = √3 . Uf
Conexión triángulo: U = Uf e I = √3 . If
De esta forma, la potencia total, para ambas conexiones, será:
P = √3 . U . I ( W )
Nota: esta expresión vale para la carga formada por resistencias, donde no
hay desfasaje de la corriente.
b ) Cargas reactivas.
Para las “cargas reactivas”, o sea, donde existe desfasaje entre el ángulo de la tensión y de la corriente, como es el caso de los motores de inducción, este desfasaje tiene que ser considerado y la expresión queda:
P =√ 3 . U . I . cos ϕ ( W )
Donde: U = Tensión de línea
I = Corriente de línea
cos ϕ = Ángulo de desfasaje entre la tensión y la corriente de fase.
La unidad de medida usual para potencia eléctrica y el Watt ( W ), correspondiente a 1 Volt x 1 Amper, o su múltiple, el kilowatt = 1.000 Watts. Esta unidad también es usada para medida de potencia mecánica. La unidad de medida usual para energía eléctrica es el kilo-watt-hora ( kWh ) correspondiente a la energía suministrada por una potencia de 1 kW funcionando durante una hora - es la unidad que aparece para cobranza en las cuentas de luz.
Potencias Aparente, Activa y Reactiva.
Potencia aparente ( S ).
Es el resultado de la multiplicación de la tensión por la corriente ( S = U . I para sistemas monofásicos y S = 3 . U . I, parasistemas trifásicos ). Corresponde a la potencia que existiría si. No hubiese desfasaje de la corriente, o sea, si la carga fuese formada por resistencias.
Entonces:
S = P/Cos ϕ ( VA )
Evidentemente, para las cargas resistivas, cos ϕ = 1 y la potencia activa se confunde con la potencia aparente. La unidad de medida para potencia aparente es el Volt- Amper ( VA ) o su múltiplo, el kilo-Volt-Amper ( kVA ).
Potencia activa ( P ).
Es la cantidad de potencia aparente que realiza trabajo, o sea, que es transformada en energía.
P = √ 3 . U . I . cos ϕ ( W ) o P = S . cos ϕ ( W )
Potencia reactiva ( Q ).
Es la cantidad de potencia aparente que “no” realiza trabajo. Solamente es transferida y almacenada en los elementos pasivos ( condensadores e inductores ) del circuito.
Q = √3 . U. I sen ϕ ( VAr ) o Q = S . sen ϕ ( VAr )
Triángulo de potencias ( carga inductiva ).

Factor de Potencia.
El factor de potencia, indicado por cos ϕ, donde ϕ y el ángulo de desfasaje de la tensión en relación a la corriente, es la relación entre la potencia activa ( P ) y la potencia aparente ( S ).
cos ϕ =P/S = P ( kW ) . 1.000 / (3 . U . I)
Así,
- Carga Resistiva: cos ϕ = 1
- Carga Inductiva: cos ϕ atrasado
- Carga Capacitiva: cos ϕ adelantado
Nota: los términos, atrasado y adelantado, se refieren al ángulo de la corriente en relación a la tensión.
Un motor no consume solamente potencia activa, que luego es convertida en trabajo mecánico y calor ( pérdidas ), sino que también consume potencia reactiva, necesaria para la magnetización que no produce trabajo. En el diagrama de la figura 1.3, el vector P representa la potencia activa y el Q la potencia reactiva, que sumadas resultan en la potencia aparente S.
Importancia del factor de potencia.
El factor de potencia es determinado midiéndose la potencia de entrada, la tensión y la corriente de carga nominal.

Por ejemplo, con el objetivo de optimizar el aprovechamiento del sistema eléctrico brasileño, reduciendo el tránsito de energía reactiva en las líneas de transmisión, subtransmisión y distribución, el decreto del DNAEE número 85, de 25 de marzo de 1992, determina que el factor de potencia de referencia de las cargas pasa de 0,85 a 0,92. El cambio del factor de potencia, otorga mayor disponibilidad de potencia activa al sistema, ya que la energía reactiva limita la capacidad de transporte de energía útil ( activa ).
El factor de potencia es determinado midiéndose la potencia de entrada, la tensión y la corriente de carga nominal.
Corrección del factor de potencia.
El aumento del factor de potencia es realizado con la conexión de una carga capacitiva, en general, un condensador o motor síncrono súper excitado, en paralelo con la carga.
Por ejemplo:
Un motor eléctrico, trifásico de 100 cv ( 75 kW ), IV polos, operando a 100% de la potencia nominal, con factor de potencia original de 0,87 y rendimiento de 93,5%.
Se desea calcular la potencia reactiva necesaria para elevar el factor de potencia a 0,95.
Solución:
Valiéndose de la tabla a continuación, en la intersección de la línea 0,87 con la columna de 0,95, se obtiene el valor de 0,238, que multiplicado por la potencia absorbida de la red por el motor en kW, resulta en el valor de la potencia reactiva necesaria para elevarse el factor de potencia de 0,87 a 0,95.
P ( HP ) x 0,736 x F x 100%
kVAr = _______________________
kVAr = _______________________
Eff. %
100 x 0,736 x 0,238 x 100%
= _________________________
93,5%
kVAr =18,735 kVAr
Donde: kVAr = Potencia trifásica del banco de condensadores a ser instalado
P( cv ) = Potencia nominal del motor
F = Factor obtenido en la tabla
Rend. % = Rendimiento del motor

Rendimiento.
El rendimiento define la eficiencia con que es hecha la conversión de la energía eléctrica absorbida de la red por el motor, en energía mecánica disponible en el eje. Llamando “Potencia útil” Pu a la potencia mecánica disponible en el eje y “Potencia absorbida” Pa a la potencia eléctrica que el motor retira de la red, el rendimiento será la relación entre las dos, o sea:
Pu ( W ) 736 . P ( cv ) 1.000 . P ( kW )
η = ________________ = ________________ = ________________
Pa ( W ) √3 . U . I. cos ϕ √3 . U . I . cos ϕ
o,
736 . P ( cv )
η%= ________________ .100
3 . U . I cos ϕ
Relación entre Conjugado y Potencia.
Cuando la energía mecánica es aplicada bajo la forma de movimiento rotativo, la potencia desarrollada depende del conjugado C y de la velocidad de rotación n. Las relaciones son:
C ( kgfm ) . n ( rpm ) C ( Nm ) . n ( rpm )
P ( cv ) = ________________ = ________________
716 7.024
C ( kgfm ) . n ( rpm ) C ( Nm ) . n ( rpm )
P ( kW ) = _________________ = _________________
974 9.555
Inversamente
716 . P ( cv ) 974 . P ( kW )C ( kgfm ) = ______________ = ______________
n ( rpm ) n ( rpm )
7.024 . P ( cv ) 9.555 . P ( kW )
C ( kgfm ) = ______________ = ______________
n ( rpm ) n ( rpm )
Sistemas de Corriente Alterna Monofásica.
La corriente alterna se caracteriza por el hecho de que la tensión, en vez de permanecer fija, como entre los polos de una batería, varía con el tiempo, cambiando de sentido alternadamente, de ahí su nombre. En el sistema monofásico, es generada y aplicada una tensión alterna U ( Volt ) entre dos alambres, a los cuales se conecta la carga, que absorbe una corriente I ( Amper ) - ver figura a :
 a) b)
a) b)
Si representamos en un gráfico los valores de U e I, a cada instante, vamos a obtener la figura b. En la figura b están también indicadas algunas grandezas que serán definidas a continuación. Note que las ondas de tensión y de corriente no están “en fase”, es decir, no pasan por el valor cero al mismo tiempo, aunque tengan la misma frecuencia; esto ocurre para muchos tipos de carga, por ejemplo, devanados de motores ( cargas reactivas ).
Frecuencia.
Es el número de veces por segundo que la tensión cambia de sentido y vuelve a la condición inicial. Es expresada en “ciclos por segundo” o “Hertz” y simbolizada por Hz.
Tensión máxima ( Umáx ).
Es el valor de “pico” de la tensión, o sea, el mayor valor instantáneo alcanzado por la tensión durante un ciclo ( este valor es alcanzado dos veces por ciclo, una vez positivo y una vez negativo ).
Corriente máxima ( Imáx ).
Es el valor de “pico” de la corriente.
Valor eficaz de tensión y corriente ( U e I ).
Es el valor de tensión y corriente continuas que desarrollan potencia correspondiente a aquella desarrollada por la corriente alterna. Se puede demostrar que el valor eficaz vale:
Umax. Imax
U = _________ e I = _______
√2 √2
Ejemplo:Si conectamos una “resistencia” a un circuito de corriente alterna:
( cos ϕ = 1 ) con Umáx = 311 V e Imáx = 14. 14 A.
P = U . I . COS ϕ = (Umax/√2) (Imax./√2) = 311*14*14 * 1
La potencia desarrollada será:P=2200 watts=2.2kW
Nota: normalmente, cuando se habla en tensión y corriente, por ejemplo, 220 V o 10 A, sin especificar nada más, estamos refiriéndonos a valores eficaces de la tensión o de la corriente que son empleados en la práctica.
Desfasaje ( ϕ ) .
Es el “atraso” de la onda de corriente en relación a la onda de la tensión ( ver figura b ). En vez de ser medido en tiempo ( segundos ), este atraso es generalmente medido en ángulo ( grados ) correspondiente a la fracción de un ciclo completo,considerando 1 ciclo = 360°. Más comúnmente, el desfasaje es expresado por el coseno del ángulo.
Conexiones en Serie y en Paralelo.
 c) d)
c) d)
Si conectamos dos cargas iguales a un sistema monofásico, esta conexión puede ser hecha de dos modos:
- Conexión en serie ( figura c ), en que la corriente total del circuito recorre las dos cargas. En este caso, la tensiónen cada carga será la mitad de la tensión del circuito
- Conexión en paralelo ( figura d ), en que es aplicada a las dos cargas la tensión del circuito. En este caso, la corriente en cada carga será la mitad de la corriente total del circuito
Sistemas de Corriente Alterna Trifásica.
El sistema trifásico está formado por la asociación de tres sistemas monofásicos de tensiones U1, U2 y U3 tales que el desfasaje entre las mismas sea de 120°, o sea, los “atrasos” de U2 en relación a U1, de U3 en relación a U2 y de U1 en relación a U3 sean iguales a 120° ( considerando un ciclo completo = 360° ). El sistema es equilibrado si las tres tensiones tienen el mismo valor eficaz U1 = U2 = U3 conforme la figura e.
 e).
e).
Conectando entre sí los tres sistemas monofásicos y eliminando los alambres innecesarios, tendremos un sistema trifásico equilibrado: tres tensiones U1, U2 y U3 equilibradas, desfasadas entre sí de 120° y aplicadas entre los tres alambres del sistema. La conexión puede ser hecha de dos maneras, representadas en los esquemas a seguir. En estos esquemas, se suele representar las tensiones con flechas inclinadas o vectores giratorios, manteniendo entre sí el ángulo correspondiente al desfasaje ( 120° ), conforme las figuras f, g, h y las figuras i, j, k.
 f. Conexiones.
f. Conexiones.

g. Diagrama Electrico.
 h. Diagrama fasorial.
h. Diagrama fasorial.
Corriente de línea ( I ).
Es la corriente en cualquiera de los tres alambres L1, L2 y L3.
Tensión y corriente de fase ( Uf e If )
Es la tensión y corriente de cada uno de los tres sistemas monofásicos considerados.
Examinando el esquema de la figura g, se observa que:
U = Uf
I = 3 . If = 1,732 If
I = If3 - If1 ( Figura h)
Ejemplo:
Tenemos un sistema equilibrado de tensión nominal 220 V. La corriente de línea medida es 10 A. Conectando a este sistema una carga trifásica compuesta por tres cargas iguales, conectadas en triángulo, ¿cuál será la tensión y la corriente en cada una de las cargas?
Tenemos Uf = U1 = 220 V en cada una de las cargas.
si I = 1,732 . If. tenemos que If = 0,577 . I = 0,577 . 10 = 5,77 A en cada una de las cargas.
Conexión Estrella.
Conectando uno de los alambres de cada sistema monofásico a un punto común a los tres, los tres alambres restantes forman un sistema trifásico en estrella ( figura 1.8a ). A veces, el sistema trifásico en estrella es “a cuatro alambres” o “con neutro”.
El cuarto alambre es conectado al punto común de las tres fases.
La tensión de línea o tensión nominal del sistema trifásico y la corriente de línea, son definidas del mismo modo que en la conexión triángulo.
i)
 j) k)
j) k)
Examinando el esquema de la figura j) , se observa que:
I = If
U = √3 * Uf = 1.732 *Uf
U = Uf1 - Uf2 ( Figura k )
Ejemplo:
Tenemos una carga trifásica compuesta por tres cargas iguales; cada carga es hecha para ser conectada a una tensión de 220 V, absorbiendo 5,77 A. ¿Cuál será la tensión nominal del sistema trifásico que alimenta a estas cargas conectadas en estrella, en sus condiciones nominales ( 220 V y 5,77 A )? ¿Cuál será la corriente de línea?
Tenemos Uf = 220 V ( tensión nominal de cada carga )
U = 1,732 . 220 = 380 V
I = If = 5,77 A

Motor de Inducción Trifásico.
El motor de inducción trifásico ( figura abajo ) está compuesto fundamentalmente por dos partes: estator y rotor.

Estator.
- Carcasa ( 1 ) - es la estructura soporte del conjunto de construcción robusta en hierro fundido, acero o aluminioinyectado, resistente a corrosión y normalmente con aletas.
- Núcleo de chapas ( 2 ) - las chapas son de acero magnético.
- Devanado trifásico ( 8 ) - tres conjuntos iguales de bobinas, una para cada fase, formando un sistema trifásico equilibrado ligado a red trifásica de alimentación.
Rotor.
- Eje ( 7 ) - transmite la potencia mecánica desarrollada porel motor.
- Núcleo de chapas ( 3 ) - las chapas poseen las mismas características de las chapas del estator
- Barras y anillos de cortocircuito ( 12 ) - son de aluminio inyectado sobre presión en una única patasza
Otras partes del motor de inducción trifásico:
- Tapa ( 4 )
- Ventilador ( 5 )
- Tapa deflectora ( 6 )
- Caja de conexión ( 9 )
- Terminales ( 10 )
- Rodamientos ( 11 )
En esta guía daremos énfasis al “motor de jaula”, cuyo rotor está constituido por un conjunto de barras no aisladas e interconectadas por anillos de cortocircuito. Lo que caracteriza al motor de inducción es que sólo el estator es conectado a la red de alimentación. El rotor no es alimentado externamente y las corrientes que circulan en el mismo son inducidas electromagnéticamente por el estator, de ahí su nombre de motor de inducción.
Principio de Funcionamiento - Campo Girante.
Cuando una bobina es recorrida por una corriente eléctrica, es creado un campo magnético, orientado conforme el eje de la bobina, siendo de valor proporcional a la corriente.

a ) En la figura anterior es indicado un “devanado monofásico” atravesado por una corriente I y el campo H creado por la misma. El devanado está constituido por un par de polos ( un polo “norte” y un polo “sur” ), cuyos efectos se suman para establecer el campo H. El flujo magnético atraviesa el rotor entre los dos polos y se cierra a través del núcleo del estator. Si la corriente I es alterna, el campo H también lo es, y su valor a cada instante será representando por el mismo gráfico de la figura b, inclusive invirtiendo el sentido en cada medio ciclo. El campo H es “pulsante”, ya que su intensidad “varía” proporcionalmente a la corriente, siempre en la “misma” dirección norte-sur
b ) En la figura 1.10b es indicado un “devanado trifásico”, que está compuesto por tres monofásicos espaciados entre sí a 120°. Si este devanado es alimentado por un sistema trifásico, las corrientes I1, I2 e I3 crearán, del mismo modo, sus propios campos magnéticos H1, H2 y H3. Estos campos son desplazados 120° entre sí. Además de eso, como son proporcionales a las respectivas corrientes, serán desfasados en el tiempo, también a 120° entre sí, pudiendo ser representados por un grafico igual al de la figura e.
El campo total H resultante, a cada instante, será igual a la suma grafica de los tres campos H1, H2 y H3 en aquel instante.
En la figura a continuación, representamos esta suma gráfica para seis instantes sucesivos.
Diagrama Fasorial.

Fasor vector.

En el instante ( 1 ), la figura , muestra que el campo H1 es máximo y los campos H2 y H3 son negativos y de mismo valor, iguales a 0,5.
El campo resultante ( suma gráfica ) es mostrado en la parte inferior de la figura 1.11 ( 1 ), teniendo la misma dirección del devanado de la fase 1.
Repitiendo la construcción para los puntos 2, 3, 4, 5 y 6 de la figura e, se observa que el campo resultante H tiene intensidad “constante”. No obstante, su dirección irá “girando”, completando una vuelta al fin de un ciclo.
De esta forma, cuando un devanado trifásico es alimentado por corrientes trifásicas, se crea un “campo girante”, como si hubiese un único par de polos girantes, de intensidad constante.
Este campo girante, creado por el devanado trifásico del estator induce tensiones en las barras del rotor ( líneas de flujo magnético cortan las barras del rotor ), que por estar cortocircuitadas generan corrientes, y, consecuentemente, un campo en el rotor, de polaridad opuesta a la del campo giratorio del estator. Como campos opuestos se atraen y como el campo del estator es rotativo, el rotor tiende a acompañar la rotación de este campo. Se desarrolla entonces, en el rotor, un conjugado motor que hace que el mismo gire, accionando la carga.
Velocidad Síncrona ( ns ).
La velocidad síncrona del motor es definida por la velocidad de rotación del campo giratorio, la cual depende del número de polos ( 2p ) del motor y de la frecuencia ( f ) de la red, en Hertz.
Los devanados pueden ser construidos con uno o más pares de polos, los que se distribuyen alternadamente ( uno “norte” y uno “sur” ) a lo largo de la periferia del núcleo magnético. El campo giratorio recorre un par de polos ( p ) a cada ciclo. De esta forma, como el devanado tiene polos o “p” pares de polos, la velocidad del campo es:
60*f 120*f
ns =________ = _________ ( rpm )
p 2p
Ejemplos:
a ) ¿Cuál es la rotación síncrona de un motor de VI polos, 50 Hz?
120 . 50
ns = ________ = 1000 rpm
6
b ) ¿Motor de XII polos, 60 Hz?
120 * 60
ns = ________ = 600 rpm
12
Note que el número de polos del motor tendrá que ser siempre par, para formar los pares de polos. Para las frecuencias y “polaridades” usuales, las velocidades síncronas son:

Para motores de “dos polos”, el campo recorre una vuelta a cada ciclo. D e esta forma, los grados eléctricos equivalen a los grados mecánicos. Para motores con más de dos polos, de acuerdo con el número de polos, un giro “geométrico” menor es recorrido por el campo.
Ejemplo:
Para un motor de VI polos tendremos, en un ciclo completo, un giro del campo de 360° x 2/6 = 120° mecánicos.
Esto equivale, lógicamente, a 1/3 de la velocidad en II polos.
Se concluye que:
Grados eléctricos = Grados mecánicos x p
Deslizamiento ( s ).
Si el motor gira a una velocidad diferente de la velocidad síncrona, o sea, diferente de la velocidad del campo girante, el devanado del rotor “corta” las líneas de fuerza magnética del campo y, por las leyes del electromagnetismo, circularán por el mismo corrientes inducidas. Cuanto mayor sea la carga, mayor tendrá que ser el conjugado necesario para accionarla. Para obtener un mayor conjugado, tendrá que ser mayor la diferencia de velocidad, para que las corrientes inducidas y los campos producidos sean mayores. Por lo tanto, a medida que la carga aumenta, la rotación del motor disminuye. Cuando la carga es cero, motor en vacío, el rotor girará prácticamente con la rotación síncrona. La diferencia entre la velocidad del motor ( n ) y la velocidad síncrona ( ns ) se llama deslizamiento ( s ), que puede ser expresado en rotaciones por minuto ( rpm ), como fracción de la velocidad síncrona, o incluso como porcentaje de ésta:
ns - n
s ( rpm ) = ns - n ; s = _______ ; s ( % ) = s*100
ns
Por lo tanto, para un deslizamiento dado s ( % ), la velocidad del motor será:
s ( % )
n = ns * ( 1 - _________ )
100
Ejemplo:
¿Cuál es el deslizamiento de un motor de VI polos, 50 Hz, si su velocidad es de 960 rpm?
1000-960
s ( % ) = _________ .100= 4%
1000
Velocidad Nominal.
Es la velocidad ( rpm ) del motor funcionando a potencia nominal, sobre tensión y frecuencia nominales. Conforme fue visto en el ítem deslizamiento, depende del deslizamiento y de la velocidad síncrona.
s%
n = ns . ( 1 - ____ ) rpm
100
Materiales y Sistemas de Aislamiento.
Siendo el motor de inducción, una máquina robusta y de construcción simple, su vida útil depende casi exclusivamente de la vida útil del aislamiento del devanado.
La misma es afectada por muchos factores, como humedad, vibraciones, ambientes corrosivos y otros. Entre todos los factores, el más importante es, sin duda, la temperatura soportada por los materiales aislantes empleados. Un aumento de 8 a 10 grados por encima del límite de la clase térmica de la temperatura del aislamiento puede reducir la vida útil del devanado por la mitad. Para un mayor tiempo de vida del motor eléctrico recomendamos la utilización de sensores térmicos para protección del devanado. Cuando hablamos de disminución de la vida útil del motor, no nos referimos a temperaturas elevadas, cuando el aislante se quema y el devanado es destruido repentinamente. La vida útil del aislamiento ( en términos de temperatura de trabajo, sensiblemente por debajo de aquella en que el material se quema ), se refiere al envejecimiento gradual del aislante, que se va tornando reseco, perdiendo el poder aislante, hasta que no soporta más la tensión aplicada y produzca el cortocircuito.
La experiencia muestra que el aislamiento tiene una duración prácticamente ilimitada, si su temperatura es mantenida por debajo del límite de su clase térmica. Por encima de este valor, la vida útil del aislamiento se torna cada vez más corta, a medida que la temperatura de trabajo es más alta. Este límite de temperatura es mucho más bajo que la temperatura de “quema” del aislante y depende del tipo de material empleado. Esta limitación de temperatura se refiere al punto más caliente del aislamiento y no necesariamente a todo el devanado. Evidentemente, basta un “punto débil” en el interior de la bobina para que el devanado quede inutilizado. Con el uso cada vez más intenso de convertidores de frecuencia, para variación de velocidad de los motores de inducción, también deben ser observados otros criterios de la aplicación para la preservación de la vida del sistema de aislamiento del motor. Más detalles pueden ser vistos en el ítem “Influencia del convertidor en el aislamiento del motor”.
Material Aislante.
El material aislante impide, limita y direcciona el flujo de las corrientes eléctricas. A pesar de que la principal función del material aislante sea la de impedir el flujo de corriente de un conductor para tierra o para un potencial más bajo, el mismo sirve también para dar soporte mecánico, proteger el conductor de degradación provocada por el medio ambiente y transferir calor para el ambiente externo.
Gases, líquidos y sólidos son usados para aislar equipos eléctricos, conforme las necesidades del sistema. Los sistemas de aislamiento influencian en la buena calidad del equipamiento, el tipo y la calidad del aislamiento, afectan el costo, el peso, el desempeño y la vida útil del mismo.
Sistema Aislante.
Una combinación de dos o más materiales aislantes, usados en un equipo eléctrico, se denomina sistema aislante. Esa combinación en un motor eléctrico consiste en el esmalte de aislamiento del alambre, aislamiento de fondo de ranura, aislamiento de cierre de ranura, aislamiento entre fases, barniz y/ o resina de impregnación, aislamiento del cable de conexión, aislamiento de soldadura. Cualquier material o componente que no esté en contacto con la bobina, no hace parte del sistema de aislamiento.
Clases Térmicas.
Como la temperatura en productos electromecánicos es frecuentemente el factor predominante para el envejecimiento del material aislante y del sistema de aislamiento, ciertas clasificaciones térmicas básicas son útiles y reconocidas mundialmente.
Los materiales y sistemas aislantes son clasificados conforme la resistencia a la temperatura por largo período de tiempo. Las normas citadas a seguir se refieren a la clasificación de materiales y sistemas aislantes:

Las clases térmicas definidas para los materiales y sistemas aislantes son las siguientes:

IEC - International Electrotechnical Commission - organización internacional no gubernamental de normas del área eléctrica, electrónica y de tecnologías relacionadas.
UL - Underwriters Laboratories - Entidad norteamericana de certificación de productos.
Se especifica que en un equipamiento electromecánico, la clase térmica representa la temperatura máxima que el equipamiento puede alcanzar en su punto más caliente, al estar operando en carga nominal, sin disminución de la vida útil. La clasificación térmica de un material, o sistema, está basada en la comparación con sistemas o material de referencia conocidos. Sin embargo, en los casos en que no se conoce ningún material de referencia, la clase térmica puede ser obtenida extrapolando la curva de durabilidad térmica ( Gráfico de Arrhenius ) para un dado tiempo ( IEC 216 especifica 20.000 horas ).
Materiales Aislantes en Sistemas de Aislamiento.
La especificación de un producto en una determinada clase térmica no significa, ni implica, que cada material aislante usado en su construcción tenga la misma capacidad térmica ( clase térmica ). El límite de temperatura para un sistema de aislamiento no puede ser directamente relacionado a la capacidad térmica de los materiales individuales utilizados en ese sistema. En un sistema, la performance térmica de un material puede ser mejorada a través de características protectoras de ciertos materiales usados con ese material.
Por ejemplo, un material de clase 155 °C puede tener su desempeño mejorado cuando el conjunto es impregnado con barniz de clase 180 °C.
A continuacion especificamos los sistemas de aislamiento de WEG Electric Motor Manufacturing Co.,Ltd.
Sistemas de Aislamiento WEG.
Para atender las variadas exigencias del mercado y aplicaciones específicas, aliadas a un excelente desempeño técnico, son utilizados nueve sistemas de aislamiento en los diversos motores WEG.
El alambre circular esmaltado es uno de los componentes más importantes del motor, ya que es la corriente eléctrica circulando por el mismo la que crea el campo magnético necesario para el funcionamiento del motor. Durante la fabricación del motor, los alambres son sometidos a esfuerzos mecánicos de tracción, flexión y abrasión. En funcionamiento, los efectos térmicos y eléctricos actúan también sobre el material aislante del alambre. Por esa razón, el mismo debe ter un buen aislamiento mecánico, térmico y eléctrico.
El esmalte utilizado actualmente en los alambres garantiza esas propatasdades, siendo la propatasdad mecánica asegurada por la camada externa del esmalte que resiste a fuerzas de abrasión durante la inserción del mismo en las ranuras del estator. La camada de esmalte interna garantiza alta rigidez dieléctrica y el conjunto, atribuye clase 200 ºC al alambre ( UL File E234451 ). Ese alambre es utilizado en todos los motores clase B, F y H. En los motores para extracción de humo ( Smoke Extraction Motor ) el alambre es especial para altísimas temperaturas.
Los films y laminados aislantes tienen la función de aislar térmica y eléctricamente partes de la bobina del motor. La clase térmica es identificada en la placa de identificación.
Éstos son a base de aramida y poliéster y poseen films y laminados, siendo usados en los siguientes puntos:
- entre la bobina y la ranura ( film de fondo de ranura ): para aislar el paquete de chapas de acero ( tierra ) de la bobina de alambres esmaltados
- entre las fases: para aislar eléctricamente las fases, una de la otra
- cierre de la ranura del estator para aislar eléctricamente la bobina localizada en la parte superior de la ranura del estator y para actuar mecánicamente de modo de mantener los alambres dentro de la ranura

Alambres y Films aplicados en el estator.
Los barnices y resinas de impregnación tienen como principales funciones mantener unidos entre sí todos los alambres esmaltados de la bobina con todos los componentes del estator y el rellenado de los espacios vacíos dentro de la ranura. La unión de los alambres impide que los mismos vibren y se rocen entre sí. El roce podría provocar fallas en el esmalte del alambre, llevándolo a un cortocircuito. La eliminación de los espacios vacíos ayuda en la disipación térmica del calor generado por el conductor y, especialmente en aplicaciones de motores alimentados por convertidores de frecuencia, evita/disminuye la formación de descargas parciales ( efecto corona ) en el interior del motor.
Actualmente se utilizan dos tipos de barnices y dos tipos de resinas de impregnación, todos a base de poliéster, para atender las necesidades constructivas y de aplicación de los motores.
La resina de silicona es utilizada apenas para motores especiales proyectados para altísimas temperaturas. Los barnices y resinas mejoran las características térmicas y eléctricas de los materiales impregnados pudiéndosele atribuir una clase térmica mayor a los materiales impregnados, cuando son comparados a los mismos materiales sin impregnación. Los barnices son aplicados por el proceso de inmersión y posterior cura en estufa. Las resinas ( exentas de solventes ) son aplicadas por el proceso de Flujo Continuo.
 Impregnación por Inmersión.
Impregnación por Inmersión.
 Flujo continuo de resina
Flujo continuo de resina
Los cables de conexión son construidos con materiales aislantes elastoméricos y de la misma clase térmica del motor. Esos materiales tienen, única y exclusivamente, la función de aislar eléctricamente el conductor del medio externo.
Los mismos tienen alta resistencia eléctrica, aliada a una adecuada flexibilidad, para permitir la fácil manipulación durante el proceso de fabricación, instalación y mantenimiento del motor. Para ciertas aplicaciones como bombas sumergidas, el cable también debe ser químicamente resistente al aceite de la bomba. Los tubos flexibles tienen la función de cubrir y aislar eléctricamente las soldaduras de las conexiones entre los alambres de la bobina y el cable de conexión, así como entre alambres.
Son flexibles para permitir que se amolden a los puntos de soldadura y al amarrado de la cabeza de la bobina. Se utilizan tres tipos de tubos:
- Tubo de poliéster termoencogíble - Clase 130 °C
- Tubo con trama de poliéster recubierto con resina acrílica - Clase 155 °C
- Tubo con trama de fibra de vidrio recubierto con goma de silicona - Clase 180 °C
2. Características de la Red de Alimentación.
El Sistema.
Generalmente, el sistema de alimentación puede ser monofásico o trifásico. El sistema monofásico es utilizado en servicios domésticos, comerciales y rurales, mientras que el sistema trifásico se utiliza en aplicaciones industriales, ambos con frecuencia de red en 50 o 60 Hz.
Trifásico.
Las tensiones trifásicas más usadas en las redes industriales son:
- Baja tensión: 220 V, 380 V y 440 V
- Alta tensión: 2.300 V, 4.160 V y 6.600 V
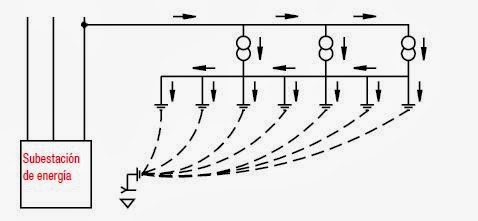
El sistema trifásico estrella de baja tensión, consiste en tres conductores de fase ( L1, L2, L3 ) y el conductor neutro ( N ), siendo éste, conectado al punto estrella del generador o
al devanado secundario de los transformadores ( conforme muestra la figura 2.1 ).
 Sistema trifasico.
Sistema trifasico.
Monofásico.
Las tensiones monofásicas estandarizadas más comunes son las de 127 V y 220 V. Los motores monofásicos son conectados a dos fases ( tensión de línea UL ) o a una fase y neutro ( tensión de fase Uf ). De esta forma, la tensión nominal del motor monofásico deberá ser igual a la tensión UL o Uf del sistema. Cuando varios motores monofásicos son conectados al sistema trifásico ( formado por tres sistemas monofásicos ), se debe tener cuidado para distribuirlos de manera uniforme, evitando así, desequilibrio de carga entre las fases.
Monofásico con retorno por tierra – MRT.
El sistema monofásico con retorno por tierra - MRT - es un sistema eléctrico en el que la tierra funciona como conductor de retorno de la corriente de carga. El MTR se presenta como solución para el empleo en el sistema monofásico, a partir de alimentadores que no tienen el conductor neutro. Dependiendo de la naturaleza del sistema eléctrico existente y de las características del suelo donde será implantado ( generalmente en la electrificación rural ), se tiene:
a ) Sistema unifilar.
Es la versión más práctica y económica del MRT, no obstante, su utilización sólo es posible donde la salida de la subestación de origen es estrella puesta a tierra.

b ) Sistema unifilar con transformador de aislamiento.
Este sistema posee algunas desventajas, además del costo del transformador, tales como:
- Limitación de la potencia del ramal a la potencia nominal del transformador de aislamiento
- Necesidad de reforzar la puesta a tierra del transformador de aislamiento, ya que en su falta, cesa el suministro de energía para todo el ramal

c ) Sistema MRT en la versión neutro parcial.
Es empleado como solución para la utilización del MRT en regiones de suelos de alta resistividad, cuando se torna difícil obtener valores de resistencia de tierra de los transformadores dentro de los límites máximos establecidos en el proyecto.
3. Características de Alimentación del Motor Eléctrico.
Tensión Nominal.
Es la tensión para la cual el motor fue proyectado.
Tensión Nominal Múltiple.
La gran mayoría de los motores es suministrada con diferentes tipos de conexión, de modo de que puedan funcionar en redes de por lo menos dos tensiones diferentes. Los principales tipos de conexión de motores para funcionamiento en más de una tensión son:
a ) Conexión serie-paralela.
El devanado de cada fase está dividido en dos partes ( vale recordar que el número de polos es siempre par, de modo que este tipo de conexión es siempre posible ):
- Conectando las dos mitades en serie, cada mitad que dará con la mitad de la tensión de fase nominal del motor
- Conectando las dos mitades en paralelo, el motor podrá ser alimentado con una tensión igual a la mitad de la tensión de la condición anterior, sin que se altere la tensión aplicada a cada bobina. Vea los ejemplos de las figuras l y m.
- Conectando las dos mitades en serie, cada mitad que dará con la mitad de la tensión de fase nominal del motor
- Conectando las dos mitades en paralelo, el motor podrá ser alimentado con una tensión igual a la mitad de la tensión de la condición anterior, sin que se altere la tensión aplicada a cada bobina. Vea los ejemplos de las figuras l y m.

l )

m)
Este tipo de conexión exige nueve terminales en el motor y la tensión nominal ( doble ) más común, es 220/440 V, o sea, el motor es reconectado a la conexión paralela cuando es alimentado con 220 V y en la conexión en serie cuando es alimentado en 440 V. Las figuras l y m muestran la numeración normal de los terminales y los esquemas de conexión para estos tipos de motores, tanto para motores conectados en estrella como en triángulo. Los mismos esquemas sirven para otras dos tensiones cualesquiera, desde que una sea el doble de la otra, por ejemplo, 230/460 V.
b ) Conexión estrella-triángulo.
El devanado de cada fase tiene las dos puntas conducidas hacia fuera del motor. Si conectamos las tres fases en triángulo, cada fase recibirá la tensión de la línea, por ejemplo, 220 V ( figura abajo ). Si conectamos las tres fases en estrella, el motor puede ser conectado a una tensión igual a 220 x √3 = 380 V. Con eso, no hay alteración en la tensión del devanado, que continua igual a 220 Volts por fase:

Conexión estrella-triángulo Y - Δ.
Este tipo de conexión exige seis terminales en el motor y sirve para cualquier tensión nominal doble, desde que la segunda sea igual a la primera multiplicada por la √3 .
Ejemplos: 220/380 V - 380/660 V - 440/760 V
En el ejemplo 440/760 V, la tensión mayor declarada sirve para indicar que el motor puede ser accionado por llave estrella-triángulo.
c ) Triple tensión nominal.
Podemos combinar los dos casos anteriores: el devanado de cada fase es dividido en dos mitades para conexión serie-paralelo. Además de eso, todos los terminales son accesibles para poder conectar las tres fases en estrella o triángulo. De este modo, tenemos cuatro combinaciones posibles de tensión nominal:
1 ) Conexión triángulo paralelo
2 ) Conexión estrella paralela, siendo igual a la tensión nominal igual a 3 veces la primera
3 ) Conexión triángulo serie, o sea, la tensión nominal igual al doble de la primera opción
4 ) Conexión estrella serie, tensión nominal igual a 3 veces la tercera opción. No obstante, como esta tensión sería mayor que 690 V, es indicada apenas como referencia de conexión estrella-triángulo
Ejemplo: 220/380/440 ( 760 ) V
Obs: 760 V ( Solamente para arranque )
Este tipo de conexión exige 12 terminales. La figura muestra la numeración normal de los terminales y el esquema de conexión para las tres tensiones nominales.

Frecuencia Nominal ( Hz ) .
Es la frecuencia de la red para la cual el motor fue proyectado.
Conexión en Frecuencias Diferentes.
Motores trifásicos devanados para 50 Hz podrán ser conectados también en red de 60 Hz.
a ) Conectando el motor de 50 Hz, con la misma tensión, en 60 Hz:
- la potencia del motor será la misma
- la corriente nominal es la misma
- la corriente de arranque disminuye en 17%
- Cp/Cn disminuye en 17%
- Cm/Cn disminuye en 17%
- la velocidad nominal aumenta en 20%
Nota: deberán ser observados los valores de potencia requeridos, para
motores que accionan equipos que poseen conjugados variables con
la rotación.
b ) Si se altera la tensión en proporción a la frecuencia:
- aumenta a potencia del motor 20%
- la corriente nominal es la misma
- la corriente de arranque será aproximadamente la misma
- el conjugado de arranque será aproximadamente el mismo
- el conjugado máximo será aproximadamente el mismo
- la rotación nominal aumenta 20%
Tolerancia de Variación de Tensión y Frecuencia.
Conforme la norma IEC 60034-1, para los motores de inducción, las combinaciones de las variaciones de tensión y de frecuencia son clasificadas como Zona A o Zona B

Límites de las variaciones de tensión y de frecuencia en funcionamiento.
Un motor debe ser capaz de desempeñar su función principal continuamente en la Zona A, pero puede no atender completamente sus características de desempeño a tensión y frecuencia nominales ( ver punto de características nominales en la figura ), presentando algunos desvíos. Las elevaciones de temperatura pueden ser superiores a aquellas a tensión y frecuencia nominales. Un motor debe ser capaz de desempeñar su función principal en la Zona B, pero puede presentar desvíos superiores a aquellos de la Zona A, en lo que se refiere a las características de desempeño a tensión y frecuencia nominales. Las elevaciones de temperatura pueden ser superiores a las verificadas con tensión y frecuencia nominales y muy probablemente superiores a aquellas de la Zona A. El funcionamiento prolongado en la periferia de la Zona B no es recomendado.
Limitación de la Corriente de Arranque en Motores Trifásicos
El arranque de un motor trifásico de jaula deberá ser directo, por medio de contactores. Se debe tener en cuenta que para un determinado motor, las curvas de conjugado y corriente son fijas, independientemente de la carga, para una tensión constante. En caso de que la corriente de arranque del motor sea elevada podrán ocurrir las siguientes consecuencias perjudiciales:
a ) Elevada caída de tensión en el sistema de alimentación de la red. En función de esto, provoca la interferencia en equipos instalados en el sistema
b ) El sistema de protección ( cables, contactores ) deberá ser superdimensionado, ocasionando un costo elevado
c ) La imposición de las concesionarias de energía eléctrica que limitan la caída de tensión de la red
En caso de que el arranque directo no sea posible, debido a los problemas citados arriba, se puede usar el sistema de arranque indirecto, para reducir la corriente de arranque:
- llave estrella-triángulo
- llave compensadora
- llave serie-paralelo
- arranque electrónica ( Soft-starter )
Arranque Directo

 Circuito de fuerza-arranque directo
Circuito de fuerza-arranque directo
F1. F2. F3 - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1 - Contactores
FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro


Circuito de fuerza-arranque con llave estrella triangulo.
Obs.: se debe utilizar la conexión "A" ( protección por 3 fusibles ) para potencias de hasta 75 cv ( 220 V ), 125 cv ( 380 V ) y 175 cv ( 440 V ). Por encima de esas potencias debe ser utilizada la conexión "B" ( protección por 6 fusibles ), donde el conjunto de fusibles F1, F2, F3 es igual al conjunto F4, F5, F6.
F1. F2. F3 - Fusibles de fuerza
( F1. F2. F3 and F4. F5. F6 ) - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1. K2. K3 - Contactores
FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Es fundamental, para el arranque, que el motor tenga la posibilidad de conexión en doble tensión, o sea, en 220/380 V, en 380/660 V o 440/760 V. Los motores deberán tener como mínimo seis bornes de conexión. El arranque estrella-triángulo podrá ser usado cuando la curva de conjugado del motor sea suficientemente elevada para poder garantizar la aceleración de la máquina con la corriente reducida. En la conexión estrella, la corriente queda reducida en 25% a 33% de la corriente de arranque en la conexión triángulo.
El conjugado resistente de la carga no podrá sobrepasar el conjugado de arranque del motor ( figura a.1 ), ni la corriente en el instante del cambio a triángulo podrá ser de valor inaceptable. Existen casos donde este sistema de arranque no puede ser usado, conforme lo demuestra la figura a.2
 fig. a.1 Corriente y conjugado para arranque estrella-triángulo de un motor de jaula accionando una carga con conjugado resistente Cr.
IΔ - corriente en triángulo
Iy - corriente en estrella
Cy - conjugado en estrella
CΔ - conjugado en triángulo
Cr - conjugado resistente
fig. a.1 Corriente y conjugado para arranque estrella-triángulo de un motor de jaula accionando una carga con conjugado resistente Cr.
IΔ - corriente en triángulo
Iy - corriente en estrella
Cy - conjugado en estrella
CΔ - conjugado en triángulo
Cr - conjugado resistente
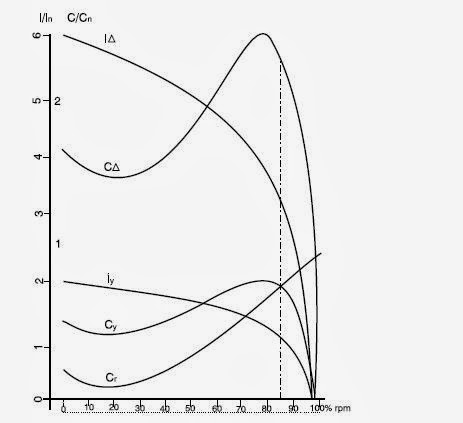
En la figura a.3 tenemos un alto conjugado resistente Cr. Si el arranque es en estrella, el motor acelera la carga aproximadamente hasta 85% de la rotación nominal. En este
punto, la llave deberá ser conectada en triángulo. En este caso, la corriente, que era aproximadamente la nominal, o sea, 100%, salta repentinamente para 320%, lo que no
es ninguna ventaja, una vez que en el arranque era de solamente 190%.
 a.2
a.2
En la figura a.3 tenemos el motor con las mismas características, no obstante, el conjugado resistente Cr es bastante menor. En la conexión Y, el motor acelera la carga en hasta 95% de la rotación nominal. Cuando la llave es conectada en Δ, la corriente, que era de aproximadamente 50%, sube a 170%, o sea, prácticamente igual a la del arranque en Y. En este caso, la conexión estrella-triángulo presenta ventaja, porque se fuese conectado directo, absorbería de la red 600% de la corriente nominal. La llave estrella-triángulo en general solo puede ser empleada en arranques de la máquina en vacío, esto es, sin carga. Solamente luego de haber alcanzado por lo menos 90% de la rotación nominal, la carga podrá ser aplicada. El instante de la conmutación de estrella a triángulo debe ser cuidadosamente determinado, para que este método de arranque pueda efectivamente ser ventajoso en los casos en que el arranque directo no es posible. En el caso de motores de triple tensión nominal ( 220/380/440/760 V ), se debe optar por la conexión 220/380 V o 440/( 760 ) V, dependiendo de la red de alimentación.
 fig. a.3
IΔ - corriente en triángulo
Iy - corriente en estrella
CΔ - conjugado en triángulo
Cy - conjugado en estrella
C/Cn - relación entre el conjugado del motor y el conjugado nominal
I/In - relación entre la corriente del motor y la corriente nominal
Cr - conjugado resistente
fig. a.3
IΔ - corriente en triángulo
Iy - corriente en estrella
CΔ - conjugado en triángulo
Cy - conjugado en estrella
C/Cn - relación entre el conjugado del motor y el conjugado nominal
I/In - relación entre la corriente del motor y la corriente nominal
Cr - conjugado resistente
Esquemáticamente, la conexión estrella-triángulo en un motor para una red de 220 V es hecha de la manera indicada en la figura 3.12, notándose que la tensión por fase durante el arranque es reducida a 127 V.

Arranque con Llave Compensadora ( Autotransformador )

 Circuito de fuerza
Circuito de fuerza
F1. F2. F3 - Fusibles de fuerza
( F1. F2. F3 e F4. F5. F6 ) - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1. K2. K3 e K4 - Contactores
1FT1 e 2FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
La llave compensadora pode ser usada para el arranque de motores bajo carga. La misma reduce la corriente de arranque, evitando una sobrecarga en el circuito, dejando, sin embargo, el motor con un conjugado suficiente para el arranque y la aceleración. La tensión en la llave compensadora es reducida a través de un autotransformador que posee normalmente taps de 50, 65 y 80% de la tensión nominal. Para los motores que arrancan con una tensión menor que la tensión nominal, la corriente y el conjugado de arranque deben ser multiplicados por los factores K1 ( factor de multiplicación de la corriente ) y K2 ( factor de multiplicación del conjugado ) obtenidos en el gráfico de la figura siguiente.
 -Factores de reducción K1 y K2 en función de las relaciones
detensión del motor y de la red Un /Un .
-Factores de reducción K1 y K2 en función de las relaciones
detensión del motor y de la red Un /Un .
 Ejemplo de las características de desempeño de un motor
de 425 cv, VI polos, cuando arranca con 85% de la tensión.
Ejemplo de las características de desempeño de un motor
de 425 cv, VI polos, cuando arranca con 85% de la tensión.
Ventajas
a ) La llave estrella-triángulo es muy utilizada por su costo reducido.
b ) No tiene límite en cuanto a su número de maniobras.
c ) Los componentes ocupan poco espacio.
d ) La corriente de arranque queda reducida para aproximadamente 1/3.
Desventajas
a ) La llave sólo puede ser aplicada a motores cuyos seis bornes o terminales sean accesibles
b ) La tensión de la red debe coincidir con la tensión en triángulo del motor
c ) Con la corriente de arranque reducida a aproximadamente 1/3 de la corriente nominal, se reducetambién el momento de arranque a 1/3
d ) En caso de que el motor no alcance por lo menos 90% de su velocidad nominal, el pico de corriente, en la conmutación de estrella a triángulo, será casi como si fuese un arranque directo, lo que se torna prejudicial para los contactos de los contactores y no aporta ninguna ventaja a la red eléctrica.
Ventajas
a ) En el tap de 65% la corriente de línea es aproximadamenteigual a la de la llave estrella-triángulo,
no obstante, en el pasajede la tensión reducida hacia la tensión de la red, el motor noes apagado y el segundo pico es drásticamente reducido, vistoque el Autotransformador, por corto tiempo, se torna una reactancia
b ) Es posible la variación del tap de 65% a 80% o incluso a 90% de la tensión de la red, a fin de que el motor pueda arrancar satisfactoriamente
Desventajas
a ) La gran desventaja es la limitación de su frecuencia de maniobras. En la llave compensadora automática es siempre necesario saber su frecuencia de maniobra para, de esa forma, determinar el autotransformador conveniente
b ) La llave compensadora es sensiblemente más cara que la llave estrella-triángulo, debido al autotransformador
c ) Debido al tamaño del auto-transformador, la construcción se torna voluminosa, necesitando cuadros mayores, lo que torna su precio elevado.

 Circuito de fuerza - arranque llave serie-paralelo
Circuito de fuerza - arranque llave serie-paralelo
F1. F2. F3 - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T2 - Transformador de comando
K1. K2. K3 - Contactores
FT1 - Relé de sobrecarga
T1 - Autotransformer
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Para arranque en serie-paralelo es necesario que el motor tenga dos tensiones nominales, siendo la menor igual a la de la red etena y la otra dos veces mayor. En este tipo de conexión, la tensión nominal más común es 220/440 V, o sea, durante el arranque el motor es conectado en la configuración en serie hasta alcanzar su rotación nominal y, entonces, se hace la conmutación para la configuración paralelo.
Limitación de la Corriente de Arranque en Motores Trifásicos
El arranque de un motor trifásico de jaula deberá ser directo, por medio de contactores. Se debe tener en cuenta que para un determinado motor, las curvas de conjugado y corriente son fijas, independientemente de la carga, para una tensión constante. En caso de que la corriente de arranque del motor sea elevada podrán ocurrir las siguientes consecuencias perjudiciales:
a ) Elevada caída de tensión en el sistema de alimentación de la red. En función de esto, provoca la interferencia en equipos instalados en el sistema
b ) El sistema de protección ( cables, contactores ) deberá ser superdimensionado, ocasionando un costo elevado
c ) La imposición de las concesionarias de energía eléctrica que limitan la caída de tensión de la red
En caso de que el arranque directo no sea posible, debido a los problemas citados arriba, se puede usar el sistema de arranque indirecto, para reducir la corriente de arranque:
- llave estrella-triángulo
- llave compensadora
- llave serie-paralelo
- arranque electrónica ( Soft-starter )
Arranque Directo
Circuito de fuerza-arranque directo
F1. F2. F3 - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1 - Contactores
FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Circuito de fuerza-arranque con llave estrella triangulo.
Obs.: se debe utilizar la conexión "A" ( protección por 3 fusibles ) para potencias de hasta 75 cv ( 220 V ), 125 cv ( 380 V ) y 175 cv ( 440 V ). Por encima de esas potencias debe ser utilizada la conexión "B" ( protección por 6 fusibles ), donde el conjunto de fusibles F1, F2, F3 es igual al conjunto F4, F5, F6.
F1. F2. F3 - Fusibles de fuerza
( F1. F2. F3 and F4. F5. F6 ) - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1. K2. K3 - Contactores
FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Es fundamental, para el arranque, que el motor tenga la posibilidad de conexión en doble tensión, o sea, en 220/380 V, en 380/660 V o 440/760 V. Los motores deberán tener como mínimo seis bornes de conexión. El arranque estrella-triángulo podrá ser usado cuando la curva de conjugado del motor sea suficientemente elevada para poder garantizar la aceleración de la máquina con la corriente reducida. En la conexión estrella, la corriente queda reducida en 25% a 33% de la corriente de arranque en la conexión triángulo.
El conjugado resistente de la carga no podrá sobrepasar el conjugado de arranque del motor ( figura a.1 ), ni la corriente en el instante del cambio a triángulo podrá ser de valor inaceptable. Existen casos donde este sistema de arranque no puede ser usado, conforme lo demuestra la figura a.2
fig. a.1 Corriente y conjugado para arranque estrella-triángulo de un motor de jaula accionando una carga con conjugado resistente Cr.
IΔ - corriente en triángulo
Iy - corriente en estrella
Cy - conjugado en estrella
CΔ - conjugado en triángulo
Cr - conjugado resistente
En la figura a.3 tenemos un alto conjugado resistente Cr. Si el arranque es en estrella, el motor acelera la carga aproximadamente hasta 85% de la rotación nominal. En este
punto, la llave deberá ser conectada en triángulo. En este caso, la corriente, que era aproximadamente la nominal, o sea, 100%, salta repentinamente para 320%, lo que no
es ninguna ventaja, una vez que en el arranque era de solamente 190%.
a.2
En la figura a.3 tenemos el motor con las mismas características, no obstante, el conjugado resistente Cr es bastante menor. En la conexión Y, el motor acelera la carga en hasta 95% de la rotación nominal. Cuando la llave es conectada en Δ, la corriente, que era de aproximadamente 50%, sube a 170%, o sea, prácticamente igual a la del arranque en Y. En este caso, la conexión estrella-triángulo presenta ventaja, porque se fuese conectado directo, absorbería de la red 600% de la corriente nominal. La llave estrella-triángulo en general solo puede ser empleada en arranques de la máquina en vacío, esto es, sin carga. Solamente luego de haber alcanzado por lo menos 90% de la rotación nominal, la carga podrá ser aplicada. El instante de la conmutación de estrella a triángulo debe ser cuidadosamente determinado, para que este método de arranque pueda efectivamente ser ventajoso en los casos en que el arranque directo no es posible. En el caso de motores de triple tensión nominal ( 220/380/440/760 V ), se debe optar por la conexión 220/380 V o 440/( 760 ) V, dependiendo de la red de alimentación.
fig. a.3
IΔ - corriente en triángulo
Iy - corriente en estrella
CΔ - conjugado en triángulo
Cy - conjugado en estrella
C/Cn - relación entre el conjugado del motor y el conjugado nominal
I/In - relación entre la corriente del motor y la corriente nominal
Cr - conjugado resistente
Esquemáticamente, la conexión estrella-triángulo en un motor para una red de 220 V es hecha de la manera indicada en la figura 3.12, notándose que la tensión por fase durante el arranque es reducida a 127 V.
Arranque con Llave Compensadora ( Autotransformador )
Circuito de fuerza
F1. F2. F3 - Fusibles de fuerza
( F1. F2. F3 e F4. F5. F6 ) - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1. K2. K3 e K4 - Contactores
1FT1 e 2FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
La llave compensadora pode ser usada para el arranque de motores bajo carga. La misma reduce la corriente de arranque, evitando una sobrecarga en el circuito, dejando, sin embargo, el motor con un conjugado suficiente para el arranque y la aceleración. La tensión en la llave compensadora es reducida a través de un autotransformador que posee normalmente taps de 50, 65 y 80% de la tensión nominal. Para los motores que arrancan con una tensión menor que la tensión nominal, la corriente y el conjugado de arranque deben ser multiplicados por los factores K1 ( factor de multiplicación de la corriente ) y K2 ( factor de multiplicación del conjugado ) obtenidos en el gráfico de la figura siguiente.
-Factores de reducción K1 y K2 en función de las relaciones
detensión del motor y de la red Un /Un .
Ejemplo de las características de desempeño de un motor
de 425 cv, VI polos, cuando arranca con 85% de la tensión.
Ventajas
a ) La llave estrella-triángulo es muy utilizada por su costo reducido.
b ) No tiene límite en cuanto a su número de maniobras.
c ) Los componentes ocupan poco espacio.
d ) La corriente de arranque queda reducida para aproximadamente 1/3.
Desventajas
a ) La llave sólo puede ser aplicada a motores cuyos seis bornes o terminales sean accesibles
b ) La tensión de la red debe coincidir con la tensión en triángulo del motor
c ) Con la corriente de arranque reducida a aproximadamente 1/3 de la corriente nominal, se reducetambién el momento de arranque a 1/3
d ) En caso de que el motor no alcance por lo menos 90% de su velocidad nominal, el pico de corriente, en la conmutación de estrella a triángulo, será casi como si fuese un arranque directo, lo que se torna prejudicial para los contactos de los contactores y no aporta ninguna ventaja a la red eléctrica.
Ventajas
a ) En el tap de 65% la corriente de línea es aproximadamenteigual a la de la llave estrella-triángulo,
no obstante, en el pasajede la tensión reducida hacia la tensión de la red, el motor noes apagado y el segundo pico es drásticamente reducido, vistoque el Autotransformador, por corto tiempo, se torna una reactancia
b ) Es posible la variación del tap de 65% a 80% o incluso a 90% de la tensión de la red, a fin de que el motor pueda arrancar satisfactoriamente
Desventajas
a ) La gran desventaja es la limitación de su frecuencia de maniobras. En la llave compensadora automática es siempre necesario saber su frecuencia de maniobra para, de esa forma, determinar el autotransformador conveniente
b ) La llave compensadora es sensiblemente más cara que la llave estrella-triángulo, debido al autotransformador
c ) Debido al tamaño del auto-transformador, la construcción se torna voluminosa, necesitando cuadros mayores, lo que torna su precio elevado.
Circuito de fuerza - arranque llave serie-paralelo
F1. F2. F3 - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T2 - Transformador de comando
K1. K2. K3 - Contactores
FT1 - Relé de sobrecarga
T1 - Autotransformer
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Para arranque en serie-paralelo es necesario que el motor tenga dos tensiones nominales, siendo la menor igual a la de la red etena y la otra dos veces mayor. En este tipo de conexión, la tensión nominal más común es 220/440 V, o sea, durante el arranque el motor es conectado en la configuración en serie hasta alcanzar su rotación nominal y, entonces, se hace la conmutación para la configuración paralelo.
El avance de la electrónica permitió la creación de la llave de arranque a estado sólido, la cual consiste en un conjunto de pares de tiristores ( SCR ) ( o combinaciones de tiristores/ diodos ), uno en cada borne de potencia del motor. El ángulo de disparo de cada par de tiristores es controlado electrónicamente para aplicar una tensión variable a los terminales del motor durante la aceleración. Al final del período de arranque, ajustable típicamente entre 2 y 30 segundos, la tensión alcanza su valor pleno tras una aceleración suave o una rampa ascendente, envés de ser sometido a incrementos o saltos repentinos. Con eso, se logra mantener la corriente de arranque ( en la línea ) próxima de la nominal y con una suave variación. Además de la ventaja del control de la tensión ( corriente ) durante el arranque, la llave electrónica presenta, también, la ventaja de no poseer partes móviles o que generen arco, como en las llaves mecánicas. Este es uno de los puntos fuertes de las llaves electrónicas, ya que su vida útil se torna más larga.

Métodos de Arranque x Motores

Espera aun mas sobre este tema la próxima semana
¿Estas en Nicaragua y necesitas comprar un motor?; contactanos!
 |




exelente informacion
ResponderBorrarsaludos de mexico df
ing neftali rios blanco
PONGAN LOS PRECIOS DE LOS APARATOS SO PENCOS
ResponderBorrar