Un motor debe ser capaz de desempeñar su función principal continuamente en la Zona A, pero puede no atender completamente sus características de desempeño a tensión y frecuencia nominales ( ver punto de características nominales en la figura ), presentando algunos desvíos. Las elevaciones de temperatura pueden ser superiores a aquellas a tensión y frecuencia nominales. Un motor debe ser capaz de desempeñar su función principal en la Zona B, pero puede presentar desvíos superiores a aquellos de la Zona A, en lo que se refiere a las características de desempeño a tensión y frecuencia nominales. Las elevaciones de temperatura pueden ser superiores a las verificadas con tensión y frecuencia nominales y muy probablemente superiores a aquellas de la Zona A. El funcionamiento prolongado en la periferia de la Zona B no es recomendado.
El arranque de un motor trifásico de jaula deberá ser directo, por medio de contactores. Se debe tener en cuenta que para un determinado motor, las curvas de conjugado y corriente son fijas, independientemente de la carga, para una tensión constante. En caso de que la corriente de arranque del motor sea elevada podrán ocurrir las siguientes consecuencias perjudiciales:
a ) Elevada caída de tensión en el sistema de alimentación de la red. En función de esto, provoca la interferencia en equipos instalados en el sistema
b ) El sistema de protección ( cables, contactores ) deberá ser superdimensionado, ocasionando un costo elevado
c ) La imposición de las concesionarias de energía eléctrica que limitan la caída de tensión de la red
En caso de que el arranque directo no sea posible, debido a los problemas citados arriba, se puede usar el sistema de arranque indirecto, para reducir la corriente de arranque:
- llave estrella-triángulo
- llave compensadora
- llave serie-paralelo
- arranque electrónica ( Soft-starter )


Circuito de fuerza-arranque directo
F1. F2. F3 - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1 - Contactores
FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Circuito de fuerza-arranque con llave estrella triangulo.
Obs.: se debe utilizar la conexión "A" ( protección por 3 fusibles ) para potencias de hasta 75 cv ( 220 V ), 125 cv ( 380 V ) y 175 cv ( 440 V ). Por encima de esas potencias debe ser utilizada la conexión "B" ( protección por 6 fusibles ), donde el conjunto de fusibles F1, F2, F3 es igual al conjunto F4, F5, F6.
F1. F2. F3 - Fusibles de fuerza
( F1. F2. F3 and F4. F5. F6 ) - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1. K2. K3 - Contactores
FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Es fundamental, para el arranque, que el motor tenga la posibilidad de conexión en doble tensión, o sea, en 220/380 V, en 380/660 V o 440/760 V. Los motores deberán tener como mínimo seis bornes de conexión. El arranque estrella-triángulo podrá ser usado cuando la curva de conjugado del motor sea suficientemente elevada para poder garantizar la aceleración de la máquina con la corriente reducida. En la conexión estrella, la corriente queda reducida en 25% a 33% de la corriente de arranque en la conexión triángulo.
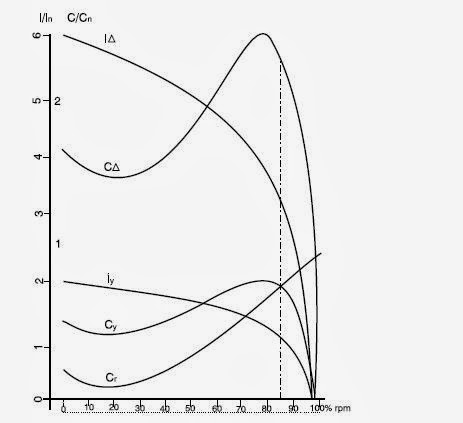
El conjugado resistente de la carga no podrá sobrepasar el conjugado de arranque del motor ( figura a.1 ), ni la corriente en el instante del cambio a triángulo podrá ser de valor inaceptable. Existen casos donde este sistema de arranque no puede ser usado, conforme lo demuestra la figura a.2
fig. a.1 Corriente y conjugado para arranque estrella-triángulo de un motor de jaula accionando una carga con conjugado resistente Cr.
IΔ - corriente en triángulo
Iy - corriente en estrella
Cy - conjugado en estrella
CΔ - conjugado en triángulo
Cr - conjugado resistente
En la figura a.3 tenemos un alto conjugado resistente Cr. Si el arranque es en estrella, el motor acelera la carga aproximadamente hasta 85% de la rotación nominal. En este
punto, la llave deberá ser conectada en triángulo. En este caso, la corriente, que era aproximadamente la nominal, o sea, 100%, salta repentinamente para 320%, lo que no
es ninguna ventaja, una vez que en el arranque era de solamente 190%.
a.2
En la figura a.3 tenemos el motor con las mismas características, no obstante, el conjugado resistente Cr es bastante menor. En la conexión Y, el motor acelera la carga en hasta 95% de la rotación nominal. Cuando la llave es conectada en Δ, la corriente, que era de aproximadamente 50%, sube a 170%, o sea, prácticamente igual a la del arranque en Y. En este caso, la conexión estrella-triángulo presenta ventaja, porque se fuese conectado directo, absorbería de la red 600% de la corriente nominal. La llave estrella-triángulo en general solo puede ser empleada en arranques de la máquina en vacío, esto es, sin carga. Solamente luego de haber alcanzado por lo menos 90% de la rotación nominal, la carga podrá ser aplicada. El instante de la conmutación de estrella a triángulo debe ser cuidadosamente determinado, para que este método de arranque pueda efectivamente ser ventajoso en los casos en que el arranque directo no es posible. En el caso de motores de triple tensión nominal ( 220/380/440/760 V ), se debe optar por la conexión 220/380 V o 440/( 760 ) V, dependiendo de la red de alimentación.

fig. a.3
IΔ - corriente en triángulo
Iy - corriente en estrella
CΔ - conjugado en triángulo
Cy - conjugado en estrella
C/Cn - relación entre el conjugado del motor y el conjugado nominal
I/In - relación entre la corriente del motor y la corriente nominal
Cr - conjugado resistente
Esquemáticamente, la conexión estrella-triángulo en un motor para una red de 220 V es hecha de la manera indicada en la figura 3.12, notándose que la tensión por fase durante el arranque es reducida a 127 V.
Circuito de fuerza
F1. F2. F3 - Fusibles de fuerza
( F1. F2. F3 e F4. F5. F6 ) - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T1 - Transformador de comando
K1. K2. K3 e K4 - Contactores
1FT1 e 2FT1 - Relé de sobrecarga
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
La llave compensadora pode ser usada para el arranque de motores bajo carga. La misma reduce la corriente de arranque, evitando una sobrecarga en el circuito, dejando, sin embargo, el motor con un conjugado suficiente para el arranque y la aceleración. La tensión en la llave compensadora es reducida a través de un autotransformador que posee normalmente taps de 50, 65 y 80% de la tensión nominal. Para los motores que arrancan con una tensión menor que la tensión nominal, la corriente y el conjugado de arranque deben ser multiplicados por los factores K1 ( factor de multiplicación de la corriente ) y K2 ( factor de multiplicación del conjugado ) obtenidos en el gráfico de la figura siguiente.
-Factores de reducción K1 y K2 en función de las relaciones
detensión del motor y de la red Un /Un .
Ejemplo de las características de desempeño de un motor
de 425 cv, VI polos, cuando arranca con 85% de la tensión.
Ventajas
a ) La llave estrella-triángulo es muy utilizada por su costo reducido.
b ) No tiene límite en cuanto a su número de maniobras.
c ) Los componentes ocupan poco espacio.
d ) La corriente de arranque queda reducida para aproximadamente 1/3.
Desventajas
a ) La llave sólo puede ser aplicada a motores cuyos seis bornes o terminales sean accesibles
b ) La tensión de la red debe coincidir con la tensión en triángulo del motor
c ) Con la corriente de arranque reducida a aproximadamente 1/3 de la corriente nominal, se reducetambién el momento de arranque a 1/3
d ) En caso de que el motor no alcance por lo menos 90% de su velocidad nominal, el pico de corriente, en la conmutación de estrella a triángulo, será casi como si fuese un arranque directo, lo que se torna prejudicial para los contactos de los contactores y no aporta ninguna ventaja a la red eléctrica.
Ventajas
a ) En el tap de 65% la corriente de línea es aproximadamenteigual a la de la llave estrella-triángulo,
no obstante, en el pasajede la tensión reducida hacia la tensión de la red, el motor noes apagado y el segundo pico es drásticamente reducido, vistoque el Autotransformador, por corto tiempo, se torna una reactancia
b ) Es posible la variación del tap de 65% a 80% o incluso a 90% de la tensión de la red, a fin de que el motor pueda arrancar satisfactoriamente
Desventajas
a ) La gran desventaja es la limitación de su frecuencia de maniobras. En la llave compensadora automática es siempre necesario saber su frecuencia de maniobra para, de esa forma, determinar el autotransformador conveniente
b ) La llave compensadora es sensiblemente más cara que la llave estrella-triángulo, debido al autotransformador
c ) Debido al tamaño del auto-transformador, la construcción se torna voluminosa, necesitando cuadros mayores, lo que torna su precio elevado.
Circuito de fuerza - arranque llave serie-paralelo
F1. F2. F3 - Fusibles de fuerza
F21. F22. F23 - Fusibles de comando
T2 - Transformador de comando
K1. K2. K3 - Contactores
FT1 - Relé de sobrecarga
T1 - Autotransformer
SH1 - Botón de comando
KT1 - Relé de tiempo
M1 - Motor
Accesorios opcionales
- Relé falta de fase
- Relé mínima y máxima tensión
- Amperímetro
- Voltímetro
- Ohmímetro
Para arranque en serie-paralelo es necesario que el motor tenga dos tensiones nominales, siendo la menor igual a la de la red etena y la otra dos veces mayor. En este tipo de conexión, la tensión nominal más común es 220/440 V, o sea, durante el arranque el motor es conectado en la configuración en serie hasta alcanzar su rotación nominal y, entonces, se hace la conmutación para la configuración paralelo.